ViDS: Video Diffusion Shader using 3D Face Tracking
Authors
Overview
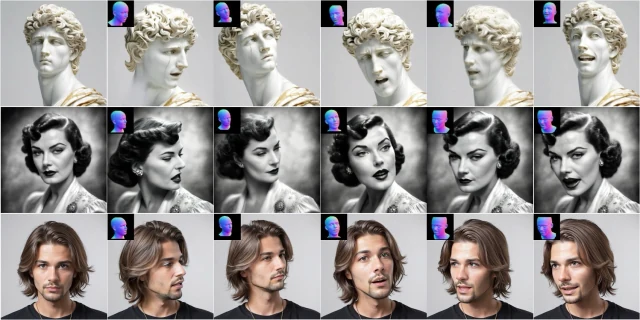
3D face tracking-conditioned video diffusion for expressive, identity-preserving portrait animation from a single image, with autoregressive sampling for longer videos. On VFHQ, ViDS ranked first on 8 of 13 reported metrics.